


7月4日,2024世界人工智能大會在上海開幕。香港中文大學教授、國科微AI首席科學家邢國良在智能汽車主題論壇發表《下一代自動駕駛技術:從嵌入式視覺到車路協同》演講。他表示,智能網聯為自動駕駛帶來全新發展機遇,特別是車載平臺與基礎設施的互聯和協同將會大大提升自動駕駛的性能和安全性。當前,國科微全系邊端AI芯片正在持續賦能車路協同,助力下一代自動駕駛技術加速落地。
在商業技術領域,據著名的比爾蓋茨法則,人們往往高估技術變革在一年內的影響,而低估技術變革在10年甚至更長時間尺度上的影響。邢國良教授表示,自動駕駛技術就是其中典型的代表。從國內外自動駕駛技術發展來看,仍主要集中在低自動化水平,與最初的發展預期有著很大的差距。特別是最近幾年來,頻發的自動駕駛交通事故降低了公眾對自動駕駛的信心和接受度。“當前來看,自動駕駛市場規模增速已呈現緩速發展趨勢。”他說。
在這種背景下,智能網聯正成為全球范圍內自動駕駛技術研究的新趨勢。邢國良教授表示,實現基于智能網聯的下一代自動駕駛技術需要在嵌入式視覺和車路協同兩個方向進行突破。其中,在車端和路側,需要高性能的多模態傳感器和感知算法支持,而在車路協同層面,需要全新的分布式算法來擴展車輛感知范圍, 提高感知精度。

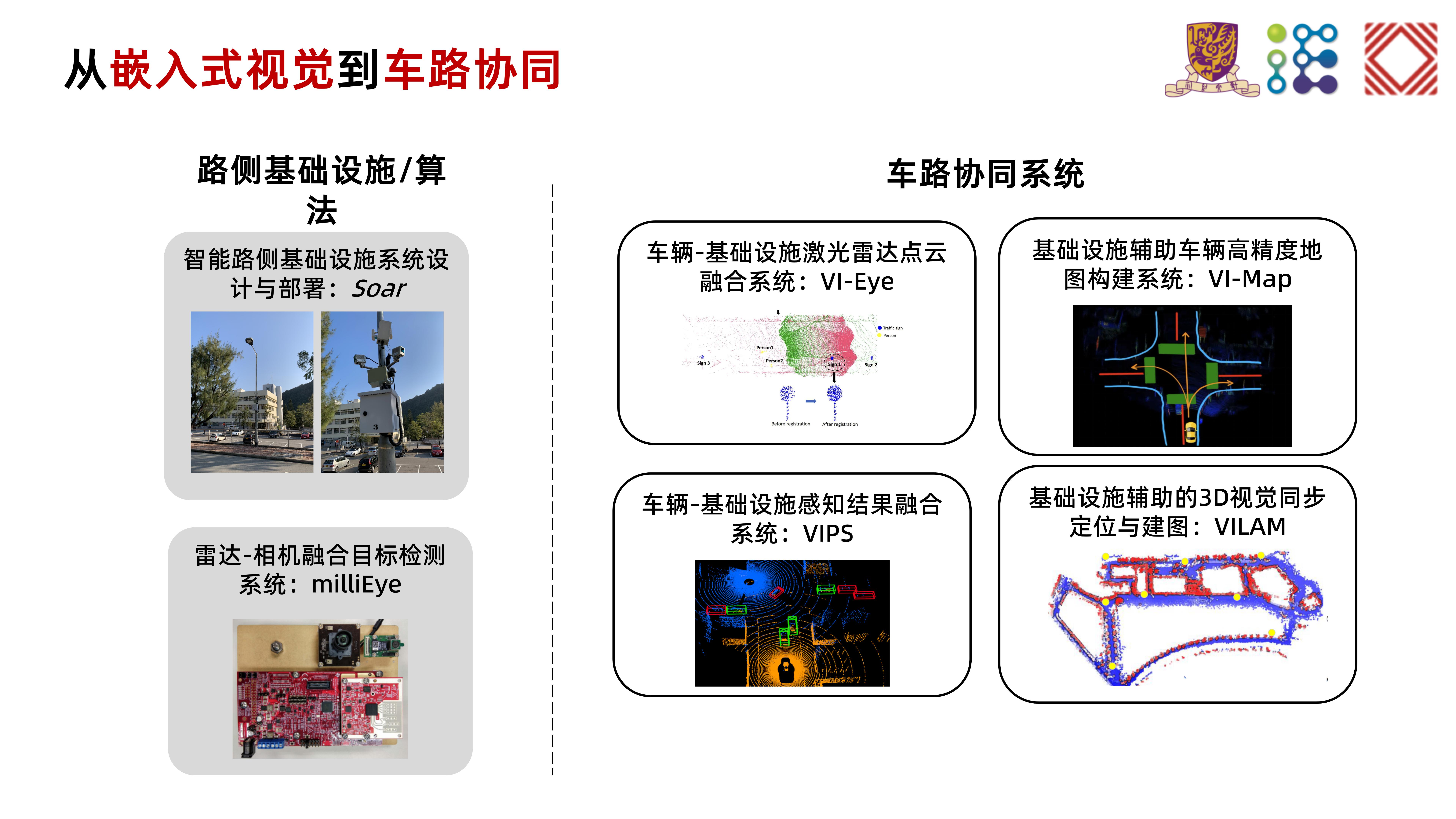
邢國良教授所在的香港中文大學嵌入式人工智能與物聯網 (AIoT) 實驗室,在嵌入式視覺和車路協同兩個方向首創多項研究成果,包括毫米波雷達-圖像融合、路側設施輔助的實時三維感知結果融合、高精度地圖構建,及SLAM系統等,并在香港中文大學校園成功部署。邢國良教授介紹,部署的車路協同系統在實測中實現94%的應用級任務成功率。
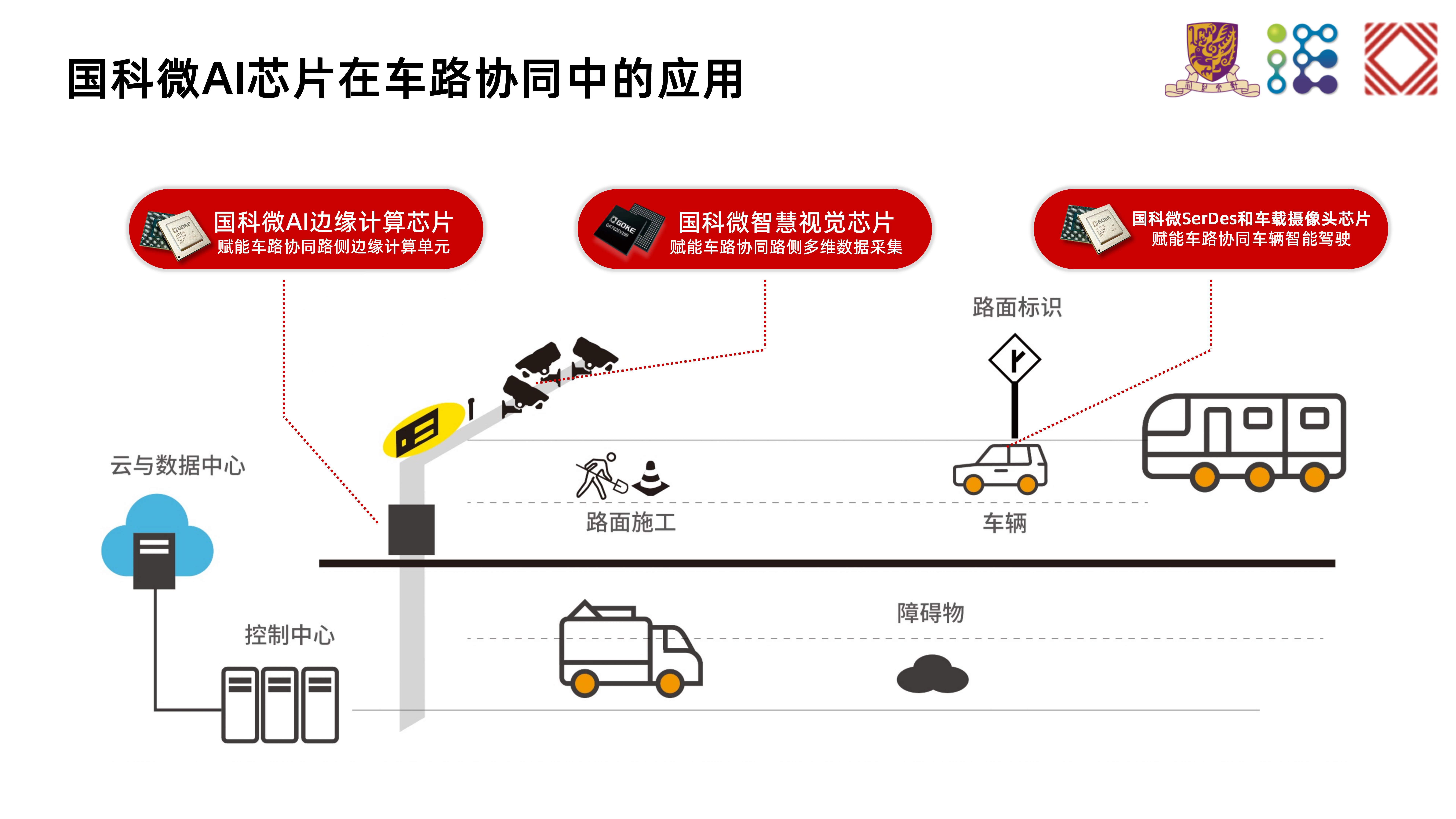
憑借在邊緣計算、智慧視覺、汽車電子等領域的深厚技術積累,國科微全系邊端AI芯片與香港中文大學人工智能與物聯網實驗室的研究成果合力賦能車路協同, 助力下一代自動駕駛。
其中,在車端,國科微車載AI攝像頭芯片與車載SerDes芯片,實現車輛安全與智能的智乘體驗;在路側,國科微智慧視覺芯片實現多維數據采集,AI邊緣計算芯片用于路側邊緣計算單元,實現數據的高速處理。

最后,邢國良教授表示,香港中文大學人工智能與物聯網實驗室與國科微將進一步加強在AIoT領域的技術合作和應用研究,在智能制造、自動駕駛、智慧醫療等領域推動更多智慧場景的落地。